Автоматический активный измерительный прибор
Применение продукта
Предиктивное управление гибкой системой, применяемое к предиктивному управлению, заключается в объединении измерения и измерения обработки в процессе обработки для формирования замкнутой измерительной системы для управления состоянием обработки станка и обеспечения отсутствия системы управления отходами обработки. Гибкое управление станком может быть достигнуто с помощью контроллера в минимально замкнутой системе, способной выполнять обработку и измерения после обработки. Измерительный прибор с компьютером, дополнительно взаимодействующий с верхним и нижним станками, может реализовать общее унифицированное управление автоматической линией. Таким образом, можно построить высокоэффективную автоматическую производственную линию без отходов обработки. Кроме того, различные датчики, соответствующие различным внешним объектам для обнаружения, могут гарантировать, что вся система не подвержена влиянию внешних факторов.
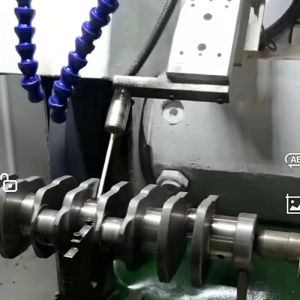
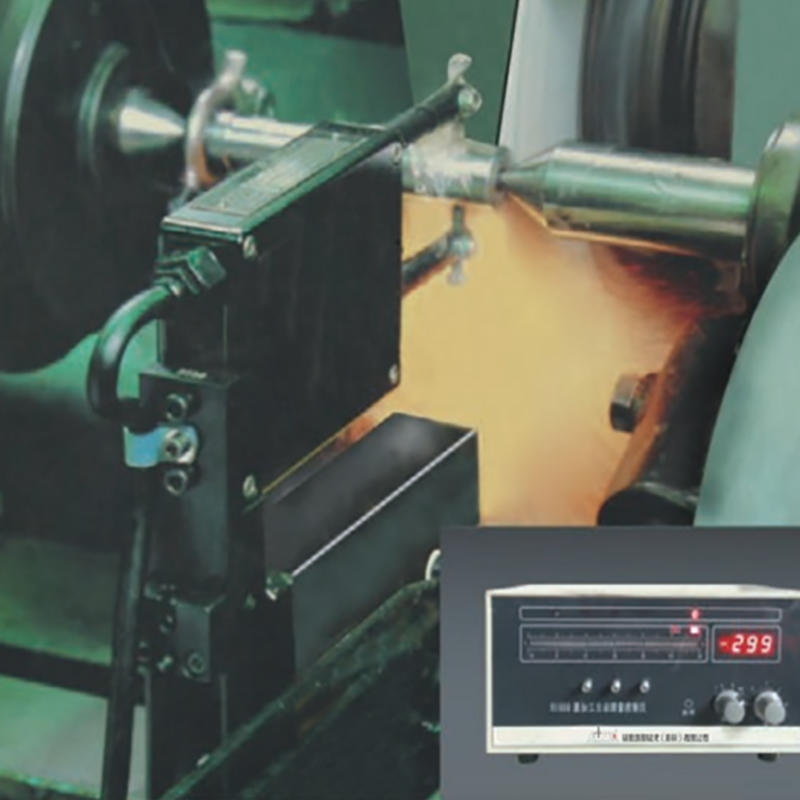
Процесс определения активного измерения. В процессе обработки измерительное устройство измеряет заготовку в любой момент времени и вводит результаты измерений в контроллер. В заданной точке сигнала контроллер посылает сигнал для управления работой станка. Например, в процессе шлифования, при подаче грубого шлифования, при достижении первой точки сигнала размера, контроллер сигнализирует, что станок переключается с подачи грубого шлифования на тонкое шлифование, при достижении второй точки сигнала размера, станок переключается с подачи тонкого шлифования на легкое шлифование (без искрового шлифования), при достижении третьей точки сигнала заготовка достигает заданного размера, шлифовальный круг быстро возвращается и переходит в состояние ожидания следующего цикла.
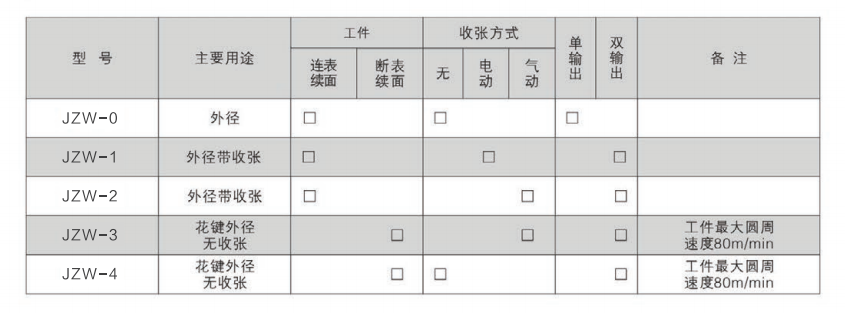
Параметр продукта
Видео о продукте

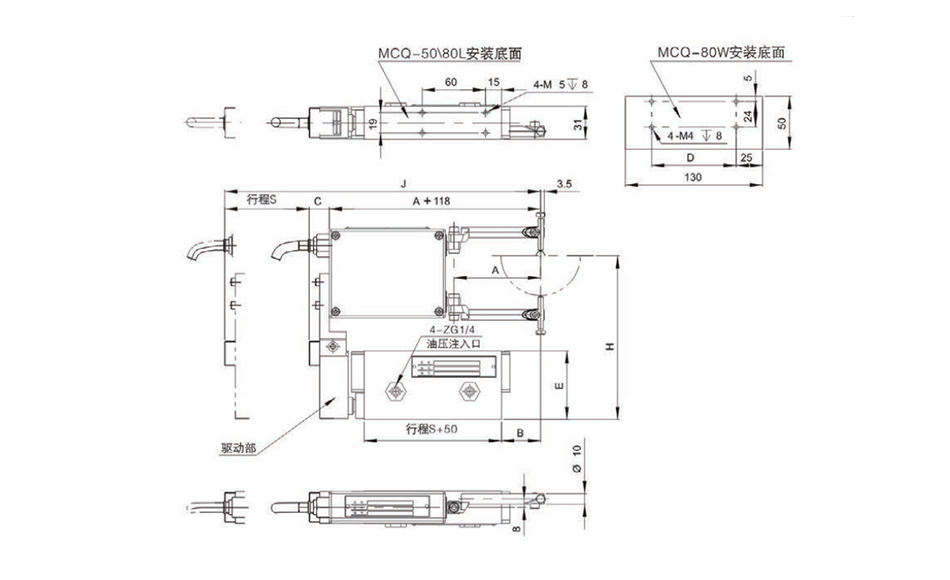
Размер продукта